Q-Pixie is a tiny closed loop position/velocity controller with quadrature feedback and configurable velocity/acceleration/power limiting that solders straight onto a N20 gearmotor.
Q-Pixie is based on the QuadQuad2Drv and features the same interface and protocol.
The board reads position and velocity information from the on-board incremental quadrature encoder and performs closed loop control on the DC motor. Communication is via SPI interface and allows configuration, commands and reading back information.
Measurement Features
- Quadrature feedback (sampled 4x per detent)
- Provides position (8, 16 or 32-bit), velocity, status and timing metadata
- Velocity up to 50,000 transitions/s with resolution of 4 transitions/s
- Home/index and edge inputs; can be used to read end-stops
Control Features
- Motor power up to 11V, 1.8A (peak)
- Power, position and velocity control modes using PID
- Power, velocity and acceleration limiting (configurable)
- Position and velocity ramp commands
- Loop rate of 500Hz
Misc Features
- Includes magnet wheel to press onto rear motor shaft
- SPI slave interface
- Streamed or polled data packets
- Operating voltage 3.3V with 5V tolerant SPI pins
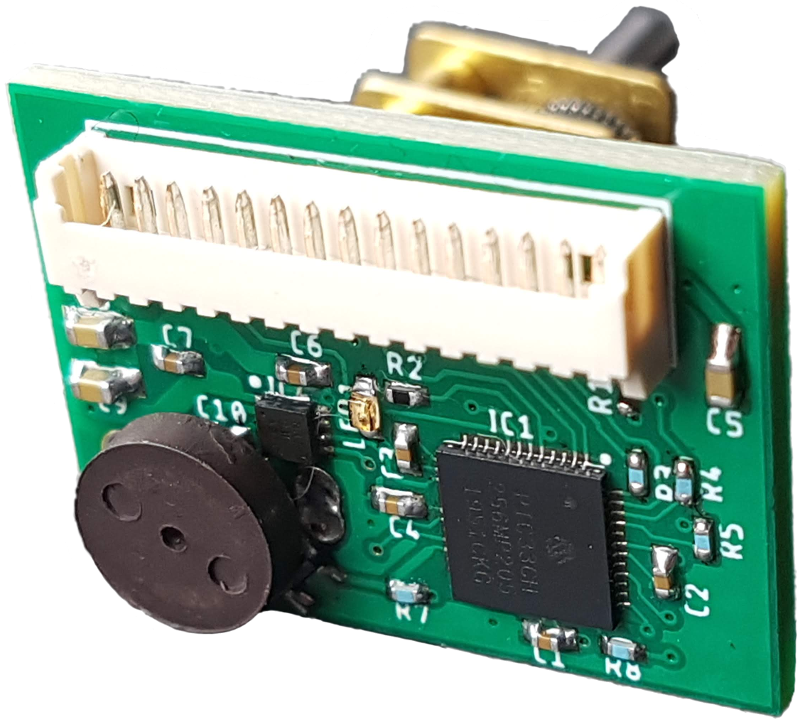
- Molex Picoblade 15-way connector
- Dimensions: 27mm x 20mm
- Bootloader for firmware updates via UART serial
- Arduino library and demo available
- PIC library available on request
The PCB comes with an optional Molex Picoblade 15-way connector, allowing for connection with an Arduino or other controller. A complete Arduino library and demo code is available for free, as well as a datasheet detailing physical connections and protocol.