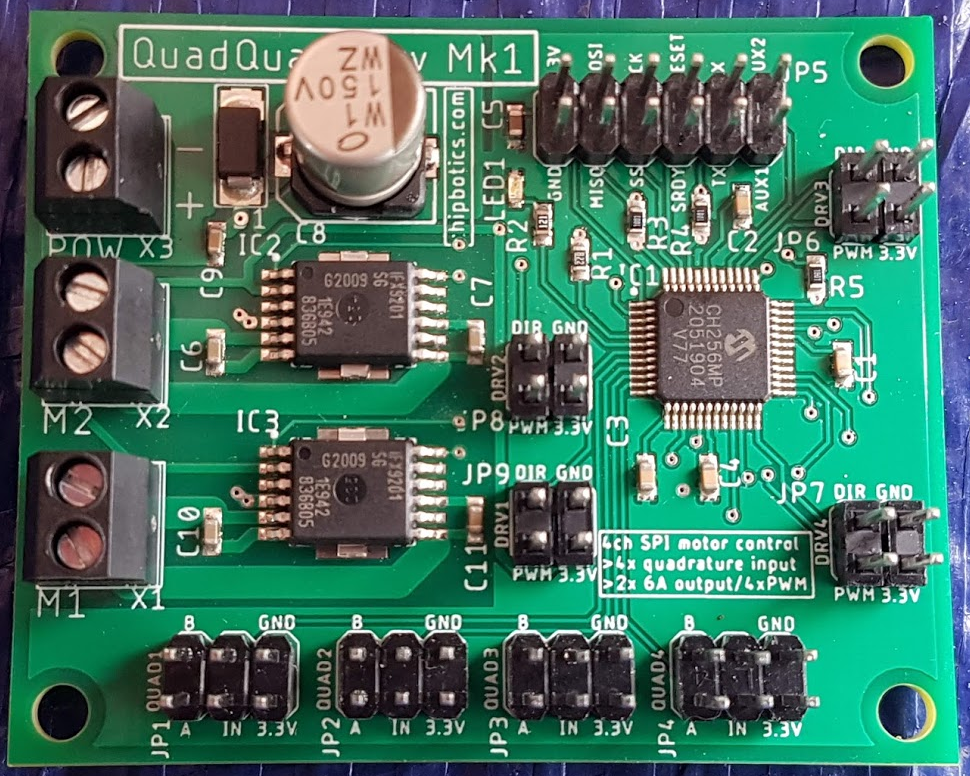
QuadQuad2Drv is a 4ch DC motor closed loop position/velocity controller with quadrature feedback and configurable velocity/acceleration/power limiting.
QuadQuad2Drv is the upgrade to QuadQuad and features much higher performance, as well as advanced closed loop PID control.
The board reads position and velocity information from up to four incremental quadrature encoders simultaneously and performs closed loop control on up to four DC motors. Communication is via SPI interface and allows configuration, commands and reading back information.
Measurement Features
- Four quadrature channels (sampled 4x per detent)
- Provides position (8, 16 or 32-bit), velocity, status and timing metadata
- Velocity up to 50,000 transitions/s with resolution of 4 transitions/s
- Home/index and edge inputs; can be used to read end-stops
Control Features
- Control up to four DC motors using PWM and direction outputs
- Two 6A 30V motor drivers on board
- Power, position and velocity control modes using PID
- Power, velocity and acceleration limiting (configurable)
- Position and velocity ramp commands
- Loop rate of 500Hz
Misc Features
- SPI slave interface
- Streamed or polled data packets
- Operating voltage 3.3V with 5V tolerant SPI pins
- Bootloader for firmware updates via UART serial
- Great for N20 gearmotors such as Pololu HP
- Arduino library and demo available
- PIC library available on request
A complete Arduino library and demo code is available for free, as well as a datasheet detailing physical connections and protocol. The microprocessor will also be made available for implementation directly onto your own robot in the future.